Desempeño de un collar GPS en el seguimiento a un oso andino (Tremarctos ornatus) en los Andes colombianos
Performance of a GPS collar tracking a spectacled bear (Tremarctos ornatus) in the Colombian Andes
Daniel Rodríguez1, Nicolás Reyes-Amaya1, Adriana Reyes1, Héctor Restrepo1, Yesid Casas2, Oswaldo Salgado3, Javier Rodríguez1, Humberto Gómez1
1 Fundación
para la Investigación, Conservación y Protección
del Oso Andino (Fundación Wii), Bogotá, Colombia.
e-mail: danielosito85@hotmail.com nicolas.reyes2@gmail.com shisdre@gmail.com restrepof@gmail.com
2 Corporación Autónoma Regional del Guavio (CORPOGUAVIO), Garagoa, Colombia. e-mail: yeco.casas2000@gmail.com
3 Nexen Petroleum Colombia Ltd., Bogotá, Colombia. e-mail: oswaldo_gomez@nexeninc.com
Fecha recepción: Agosto 24,
2015 Fecha
aprobación: Diciembre 6,
2015 Editor Asociado: Valois-Cuesta H
Resumen
Objetivo:
Describir por primera vez el desempeño de un collar de
telemetría GPS en el seguimiento a un oso andino silvestre en
los ecosistemas montañosos de los Andes colombianos
(Cundinamarca, Colombia), como un aporte al conocimiento de la
efectividad de esta técnica en la especie. Metodología:
Se relacionó el número de posiciones GPS obtenidas y
esperadas, el número de satélites enlazados, tipo de
posición (2D, 3D), valores de dilusión horizontal de
precisión, tiempo para la primera posición , estado de
actividad-inactividad del oso y horas de día (luz: 05:00-18:00)
o noche (oscuridad: 01:00-04:00 y 19:00-24:00) en que fueron obtenidos
estos datos. Resultados: Existió
diferencia significativa en la actividad del oso marcado,
mostrándolo activo durante el día e inactivo en la noche
(M-Wt, p=4.456E-38). No existió diferencia en el éxito de
posiciones entre día-noche (t test, p=0.50) o entre
actividad-inactividad (t test, p=0.73), sin embargo la actividad se
correlacionó positivamente con el número de
satélites (p=3.781E-5, r=0.22) y negativamente con los valores
HDOP (p=1.583E-11, r=-0.35) y TTFF (p=8.911E-12, r=-0.36). Una vez en
funcionamiento, el collar asumió una programación diaria
de toma de posiciones distinta a la establecida, y dejó de
funcionar súbitamente a los 41 días de seguimiento,
permitiendo un éxito de posiciones de 5.3% respecto a lo
esperado para 12 meses. Conclusiones: Durante
el funcionamiento del dispositivo los patrones de actividad de esta
especie y las coberturas boscosas/rocosas asociadas con su descanso
nocturno, no afectaron negativamente el éxito de toma de
posiciones, pero sí la calidad de las mismas. El daño
prematuro del collar y el cambio arbitrario que asumió sobre la
programación diaria de toma de posiciones, indican que el
dispositivo evaluado no mostró un buen desempeño para el
seguimiento del oso marcado.
Palabras clave: Andes, Collar ATS, Colombia, Oso andino, Oso de anteojos, Telemetría satelital.
Abstract
Objective: Describe
for the first time the performance of a GPS telemetry collar during the
tracking of a wild spectacled bear in the mountainous ecosystems of
Colombian Andes (Cundinamarca, Colombia), as a contribution to the
knowledge of the effectiveness of this technique on the species. Methodology:
The number of GPS positions expected and obtained were associated with
the number of linked satellites, type of position (2D, 3D), values of
horizontal dilution of precision, time to first fix,
activity-inactivity state of the bear and hours of the day (light:
05:00-18:00) or night (dark: 01:00-04:00 and 19:00-24:00) in which
these data were obtained. Results:
There was significant difference in activity levels of the marked bear,
showing it active during the day and inactive at night (M-Wt,
p=4.456E-38). There was no difference in the success of positions
between day-night (t test, p=0.50) or activity-inactivity (t test,
p=0.73), nevertheless the activity was positively correlated with the
number of satellites (p=3.781E-5, r=0.22) and negatively correlated
with HDOP (p=1.583E-11, r=-0.35) and TTFF (p=8.911E-12, r=-0.36). Once
operational the collar assumed a daily schedule of taking positions
different from the established, and suddenly stopped working at 41 days
of the tracking, allowing a success of positions of 5.3% compared to
expectations for 12 months. Conclusions: During
the operation of the device, activity patterns of this species and the
forest/rocky covers associated with its nocturnal resting, did not
negatively affect the success of positions, but its quality. Premature
damage of the collar and the arbitrary change that did on the daily
schedule of taking positions, indicate that the device assessed did not
showed a good performance for tracking the bear marked.
Keywords: Andes, Andean Bear, ATS Collar, Colombia, Satellital telemetry, Spectacled bear.
Introducción
La telemetría aplicada a la biología ha fortalecido la
capacidad de los investigadores de vida silvestre para responder
preguntas ecológicas, fisiológicas, comportamentales y
demográficas de las especies (Kays et al. 2015). Los collares
convencionales de frecuencia muy alta (VHF, por sus siglas en
inglés) han liderado esta práctica. No obstante, desde la
década de 1990 la incursión de collares con
tecnología GPS toma impulso, debido a la supresión de la
disponibilidad selectiva (SA) antes impuesta por el Departamento de
Defensa de los Estados Unidos y a la fabricación de unidades
más pequeñas y precisas (Millspaugh y Marzluff 2001,
D’eon y Delparte 2005, Kays et al. 2015). Sin embargo, esta
tecnología posee limitaciones propias (Lewis et al. 2007).
La telemetría ha aportado conocimiento valioso sobre varias
especies de osos (Garshelis 2004, Heard et al. 2008, Evans et al.
2012), extendiéndose al estudio del úrsido neotropical
Tremarctos ornatus en algunos países de su distribución.
En Ecuador desde hace 20 años con el uso de collares VHF y GPS
(Castellanos 2014) y más recientemente en Bolivia (Paisley y
Garshelis 2006) y Perú (Amanzo et al. 2014, Van Horn et al.
2014) con el uso de collares GPS. En Colombia se han desarrollado
cuatro experiencias de marcaje a osos andinos con collares VHF
(Rodríguez et al. 2004, Restrepo et al. 2014), mientras que la
abordada en el presente estudio constituye la primera experiencia con
un collar GPS en el país para esta especie (Rodríguez et
al. 2015). Sin embargo, existe un antecedente en el que se marcó
un tapir de montaña (Tapirus pinchaque) con un collar GPS en los
Andes colombianos (Risaralda, Colombia), registrándose algunos
aspectos de su funcionamiento (Lizcano y Cavelier 2004). Dado que el
desempeño de estos collares varía entre la especie
objetivo de marcaje y las condiciones de uso (Moen et al. 2001), se
consideró importante describir su funcionamiento sobre un oso
andino silvestre en los ambientes montañosos de los Andes de
Cundinamarca, Colombia, como un aporte al conocimiento sobre la
efectividad de esta técnica en el seguimiento a esta especie.
Metodología
En octubre de 2013 se capturó en el municipio de Junín
(Cundinamarca) un oso andino (T. ornatus), macho silvestre de 130 kg,
utilizando una trampa Iznachi (Castellanos 2002) cebada con miel. El
individuo fue contenido químicamente con una solución de
ketamina (2 mg/kg), atropina (0.022 mg/kg), midazolam (0.4 mg/kg) e
hidromorfona (0.1 mg/kg), y marcado con un collar de telemetría
dual (VHF-GPS) de la marca Advanced Telemetry Systems (ATS®) modelo
G2110E, equipado con un dispositivo de caída programado para
activarse a los 12 meses de funcionamiento cuando la batería
estuviese por agotarse (Figura 1).

El área de estudio comprendió parte de los municipios de
Junín, La Calera, Choachí y Fómeque en el
departamento de Cundinamarca, sobre la vertiente occidental de la
cordillera oriental de los Andes colombianos en inmediaciones del
Parque Nacional Natural de Chingaza y su área de influencia
directa (jurisdicción de CORPOGUAVIO), sitios por donde se
desplazó el oso andino marcado. La zona se caracteriza por
poseer una topografía montañosa con pendientes medias a
fuertes (terrenos desde ondulados a quebrados) en paisajes coluviales y
montañas estructurales denudativas, donde se ubican ecosistemas
de bosque andino, subpáramo y páramo intervenidos (Cleef
1978). Posee temperaturas promedio anuales entre 5.7°C a 16°C
(Rangel-Ch 2000, Vargas y Pedraza 2004), presentando un promedio anual
de precipitaciones de hasta 1861 mm y humedad de hasta 90%, en un
régimen de lluvias monomodal con un período húmedo
entre abril y octubre (máximas entre junio y julio) y un
período seco entre noviembre y marzo (mínimas entre
diciembre y enero) (INDERENA 1986, Aguilar y Rangel-Ch 1996).
Se relacionó el número de posiciones GPS obtenidas y
esperadas, el número de satélites enlazados para su
obtención, el tipo de posición obtenida (2D:
latitud-longitud, 3D: latitud-longitud-altitud), los valores de
dilusión horizontal de precisión (HDOP): relación
geométrica de los satélites enlazados entre sí y
con el receptor GPS (tomando valores inversamente proporcionales a la
precisión de la posición obtenida) (Langley 1999), el
tiempo para la primera posición (TTFF): tiempo en segundos que
tarda la unidad GPS en localizar satélites para tomar cada
posición, el estado de actividad-inactividad del oso marcado y
las horas de día (luz: 05:00-18:00) o noche (oscuridad:
01:00-04:00 y 19:00-24:00) en las que fueron obtenidos estos datos. El
estado de actividad medido por el collar tomó valores entre 0%
(total inactividad) y 99% (máxima actividad); los umbrales para
definir actividad-inactividad basados en valores registrados por
collares GPS varían entre especies, marcas de collar, individuo
marcado (Moen et al. 1996a, Kozakai et al. 2008, Owen-Smith y Goodall
2014), e incluso la edad del mismo (Yamazaki et al. 2008). Se
utilizó la metodología de Gervasi et al. (2006) para
determinar el umbral, que se basa en el patrón de actividad
específico del individuo marcado, estableciéndolo como
18% (activo ≥18%, inactivo <18%). El umbral para determinar el
HDOP máximo permitido sin que una posición perdiera
utilidad se fijó en 3, siguiendo a Lizcano y Cavelier (2004).
Antes de ser instalado sobre el animal a marcar, el collar se
programó para tomar y almacenar diariamente una posición
y sus datos asociados hora de por medio, como sigue: 01:00, 03:00
(noche), 05:00, 07:00, 09:00, 11:00, 13:00, 15:00, 17:00 (día),
19:00, 21:00, 23:00 (noche), y retransmitirlas cada 12 horas vía
e-mail (total: 12 posiciones diarias esperadas; 7 diurnas, 5
nocturnas). No obstante, debido a un fallo del dispositivo, desde el
inicio de su funcionamiento sobre el oso marcado, este asumió
una programación distinta: una posición hora de por medio
entre las 13:00 a 17:00 (día), y 19:00 a 23:00 (noche), y una
posición continuamente cada hora entre las 05:00 a 12:00
(día), y 01:00 a 04:00 (noche) (total: 18 posiciones diarias
esperadas; 11 diurnas, 7 nocturnas). Estas últimas condiciones
impuestas por el collar fueron las utilizadas para describir su
funcionamiento.
Resultados
Considerando la expectativa de vida de 12 meses del collar GPS
utilizado, de 6.570 posiciones esperadas para este lapso, se obtuvo un
total de 348 (éxito de 5,3%) durante 41 días de
funcionamiento (octubre 25-diciembre 4), después de lo cual
dejó de emitir posiciones GPS y señal VHF, impidiendo su
localización o recuperación.
Considerando sólo el período de seguimiento efectivo que
permitió el collar (41 días), de 738 posiciones esperadas
para este lapso, las 348 obtenidas significaron un éxito de
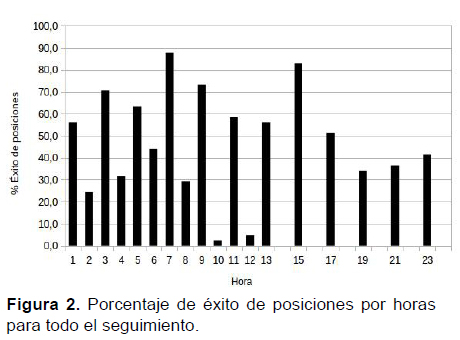
47,2%. De las posiciones diurnas (451) y nocturnas (287) esperadas para
este mismo período, obtuvo 227 (éxito de 50,3%) y 121
(éxito de 42,2%), respectivamente. Los picos con mayor
porcentaje de éxito para todo el seguimiento se presentaron a
las 07:00, 09:00 y 15:00 (horas diurnas) (Figura 2),
sin embargo no existió diferencia significativa para los
porcentajes de éxito entre las horas diurnas y nocturnas durante
todo el seguimiento (t test, p=0.50).
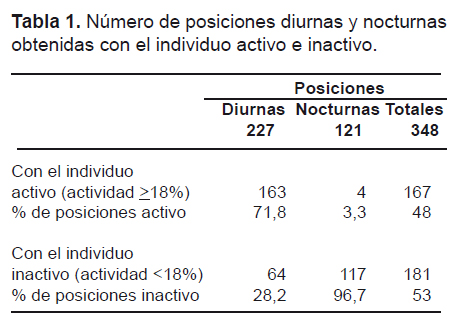
Según el umbral para determinar actividad e inactividad
establecido mediante la metodología de Gervasi et al. (2006), el
oso se mostró activo (actividad ≥18%) en 48% e inactivo
(actividad <18%) en 52% del total de posiciones obtenidas a lo largo
del seguimiento. Al discriminar el total de posiciones obtenidas entre
diurnas y nocturnas se encontró que, respecto a las posiciones
diurnas, el individuo se presentó activo en 71,8% e inactivo en
28,2% de estas, mientras que respecto a las posiciones nocturnas se
presentó activo en 3,3% e inactivo en 96,7% (Tabla 1),
reflejándose en una diferencia significativa de los valores de
actividad registrados para el día y la noche durante todo el
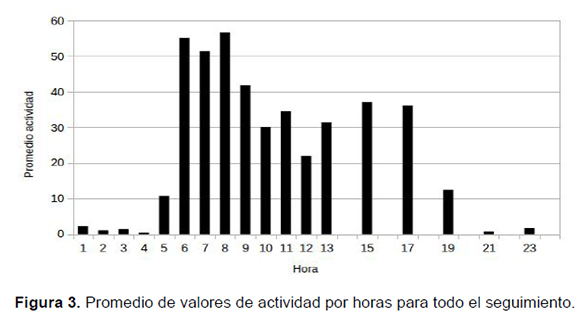
seguimiento [Mann-Whitney test (M-Wt), p=4.456E-38]. El promedio de los
valores de actividad por horas para todo el seguimiento mostró
que el oso marcado estuvo en promedio activo (actividad ≥18%)
durante el día entre las 06:00-17:00 (máximo promedio de
actividad a las 6:00 y 8:00, actividad de 52,2% y 56,8%,
respectivamente), con un decrecimiento leve de la actividad promedio
diurna a las 10:00, 12:00 y 13:00, mientras que estuvo en promedio
inactivo (actividad <18%) durante la noche entre la 01:00-05:00 y
18:00-24:00 (mínimo promedio de actividad a las 2:00; 4:00 y
21:00, actividad de 1.0, 0.4 y 0.7, respectivamente), con un aumento
leve de la actividad promedio nocturna a las 19:00 (Figura 3),
existiendo diferencia significativa de los valores de actividad
obtenidos entre las horas en que el oso se encontró en promedio
activo y las horas en que se encontró en promedio inactivo para
todo el seguimiento (M-Wt, p=4.487E-4). No existió diferencia
significativa en los porcentajes de éxito de posiciones entre
las horas en que el individuo marcado se mostró en promedio
activo o inactivo para todo el seguimiento (t test, p=0.73).
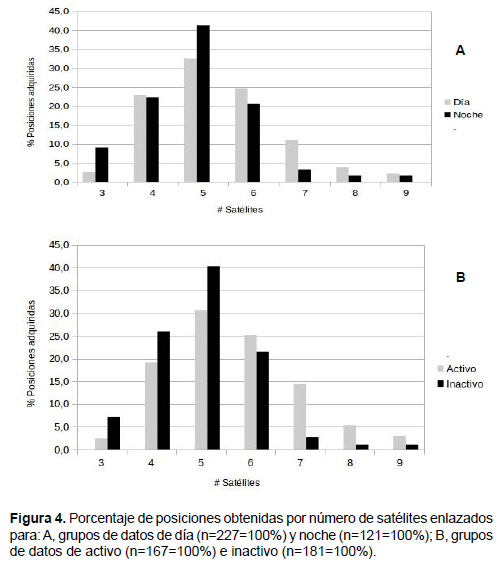
Del total de posiciones obtenidas, 95,1% fueron generadas con un
número ≥4 satélites, asimismo 84,5% fueron
tridimensionales (3D). Respecto al número de satélites
enlazados, confrontando los grupos de datos de día y de noche,
el grupo de datos obtenidos de día obtuvo siempre un mayor
porcentaje de posiciones para las categorías de 4, y 6 a 9
satélites respecto al grupo de noche, mientras que el grupo de
datos de noche obtuvo siempre un mayor porcentaje para las
categorías de 3 y 5 satélites respecto al grupo de
día (Figura 4A). Confrontando los
grupos de datos de individuo activo e inactivo, activo obtuvo siempre
un mayor porcentaje de posiciones para las categorías de ≥6
satélites, mientras que inactivo obtuvo siempre un mayor
porcentaje para las categorías de ≤5 satélites (Figura 4B).
Los valores de actividad presentaron diferencia significativa entre las
posiciones obtenidas con ≥6 satélites y las obtenidas con
≤5 satélites (M-Wt, p=2.336E-5). Con respecto al tipo de
posiciones 2D o 3D, confrontando los grupos de datos de día y
noche, el grupo de datos de día obtuvo un mayor porcentaje de
posiciones 3D respecto al grupo de datos de noche (Figura 5A).
Confrontando los grupos de datos de individuo activo e individuo
inactivo, el grupo de datos de individuo activo obtuvo un mayor
porcentaje de posiciones 3D respecto al grupo de datos de individuo
inactivo (Figura 5B). Los valores de
actividad presentaron diferencia significativa entre las posiciones del
tipo 2D y del tipo 3D (M-Wt, p=2.626E-4).

Los valores HDOP se mostraron dentro de los niveles aceptables (HDOP
≤3) en 85,3% del total de posiciones, presentándose dentro de
estos niveles en 89,9% de las posiciones diurnas y en 76,9% de las
posiciones nocturnas, así como en 91,6% de las posiciones
obtenidas con el oso activo y en 79,6% de las obtenidas con el oso
inactivo, existiendo diferencia significativa entre los valores HDOP
registrados de día y de noche (M-Wt, p=1.609E-7), y entre el
estado de actividad e inactividad (M-Wt, p=5.759E-11). El promedio de
HDOP por horas para todo el seguimiento mostró que los
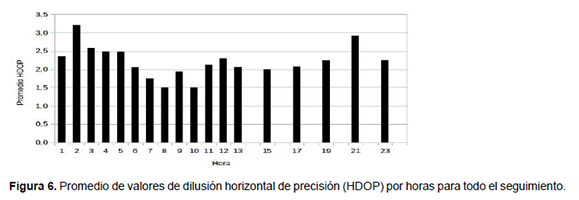
más altos se registraron a las 02:00 y 21:00 (horas nocturnas) (Figura 6). El promedio de valores HDOP para todas las posiciones obtenidas fue 2,2.
El TTFF se encontró por debajo de un minuto (TTFF ≤60 seg) en
60,1% del total de posiciones obtenidas, presentándose dentro de
estos niveles en 68,3% de las posiciones diurnas y en 44,6% de las
posiciones nocturnas, así como en 77,8% de las posiciones
obtenidas con el oso activo y en 44,6% de las obtenidas con el oso
inactivo, existiendo diferencia significativa entre los valores TTFF
registrados de día y de noche (M-Wt, p=1.656E-7), y entre el
estado de actividad e inactividad (M-Wt, p=1.411E-13). El promedio de
valores TTFF por horas para la duración del seguimiento
mostró que los más altos se registraron a la 01:00,
12:00, 19:00, 21:00 y 23:00 (cuatro nocturnas, una diurna) (Figura 7). El promedio de valores TTFF para todas las posiciones obtenidas fue 62,1 seg.
La actividad mostró correlación estadística
positiva con el número de satélites (p=3.7814E-5, r=0.22)
y negativa con los valores HDOP (p=1.583E-11, r=-0.35) y TTFF
(p=8.911E-12, r=-0.36).
Discusión
El daño prematuro del collar, causante del bajo éxito de
posiciones respeto a lo esperado para 12 meses (éxito 5,3%),
concuerda con lo reportado dentro de los Andes para las marcas de
collares GPS Lotek (Lizcano y Cavelier 2004), Telemetry Solutions,
North Star y Advanced Telemetry Systems (ATS) (Castellanos 2014), y
fuera de ellos para las marcas Lotek (Moen et al. 2001), Televit
(Zweifel-Schielly y Suter 2007) y Habit (Blackie 2010), que dejaron de
funcionar anticipadamente por humedad u otras causas no reportadas.
Además, el hecho de que el collar utilizado en este estudio, una
vez puesto sobre el oso asumiera una programación de toma de
posiciones distinta a la establecida por el usuario, sugiere que
podrían existir problemas de fábrica asociados con la
programación del dispositivo.
Los resultados del presente estudio ratifican lo encontrado sobre
patrones de actividad en osos andinos silvestres en Bolivia (Paisley y
Garshelis 2006) y reintroducidos en Ecuador (Castellanos et al. 2005),
mostrando que estos osos son esencialmente diurnos (M-Wt, P =
4.456E-38), pero presentan leves picos de actividad al comienzo de la
noche y de inactividad hacia la mitad del día (Figura 3).
Las coberturas vegetales densas y las barreras topográficas son
reconocidas como factores que influyen en la adquisición de
posiciones GPS y su calidad en collares de telemetría (Rempel et
al. 1995, Moen et al. 1996b, Lewis et al. 2007). Pese a que en este
estudio no existió diferencia significativa del éxito de
posiciones entre día-noche (t test, p=0.50) o
actividad-inactividad (t test, p=0.73), la relación de las horas
diurnas con la actividad y nocturnas con la inactividad (M-Wt,
p=4.456E-38) (Figura 3) (Tabla 1),
muestra que la menor calidad de las posiciones durante la inactividad
nocturna, donde se enlazaron un menor número de satélites
(Figura 4, A, B), se obtuvieron menos posiciones 3D (Figura 5A y B), mayores valores HDOP (M-Wt, p=1.609E-7; M-Wt, p=5.759E-11) (Figura 6) y mayores valores TTFF (M-Wt, p=1.656E-7; M-Wt, p=1.411E-13) (Figura 7),
puede deberse a que el oso durante su actividad diurna encuentra con
frecuencia sitios abiertos donde el collar adquiere posiciones GPS de
mayor calidad, mientras que durante la inactividad nocturna este
atributo se ve afectado negativamente por las coberturas vegetales
(bosque denso) o rocosas (cuevas) en las que esta especie descansa
(Reyes-Amaya 2015), hipótesis respaldada en este estudio por la
correlación positiva de la actividad con el número de
satélites (p=3.7814E-5, r=0.22) y negativa con los valores HDOP
(p=1.583E-11, r=-0.35) y TTFF (p=8.911E-12, r=-0.36). Lo anterior
concuerda con lo informado para otras especies, donde el éxito
de adquisición de posiciones GPS y su calidad se
relacionó con los patrones de actividad de estas dependiendo de
su historia natural, viéndose afectados estos atributos de forma
negativa por las coberturas densas en que descansan los venados Cervus
elaphus (Zweifel-Schielly y Suter 2007) y Odocoileus virginianus
(Bowman et al. 2000) durante el día y el oso Grizzly (Ursus
arctos) durante la noche (Heard et al. 2008), o incluso por actividades
de búsqueda de alimento que en algunas especies implican cavar
prolongadamente (e.g. U. americanus; Obbard et al. 1998), en las que el
collar GPS queda oculto del cielo durante períodos prolongados
(D’eon y Delparte 2005). Este efecto negativo de las coberturas
densas sobre la cantidad y calidad de las posiciones adquiridas por
collares GPS se ha documentado como una fuente de sesgos en estudios de
uso de hábitat, porque al recibirse menos posiciones y de menor
calidad cuando los individuos se encuentran haciendo uso de
hábitats con coberturas más densas, se puede subestimar
el uso de estos hábitats (Obbard et al. 1998, Moen et al. 2001,
Heard et al. 2008).
Analizando sólo el tiempo de seguimiento efectivo que
permitió el collar, a pesar de las coberturas boscosas, de
nubosidad y las complejas condiciones topográficas del
área de estudio, este presentó un buen desempeño
durante su funcionamiento, con 47,2% de éxito para las
posiciones esperadas en este tiempo, 95,1% generadas mediante ≥4
satélites, 84,5% del tipo 3D, 85,3% con HDOP ≤3 (promedio
para todas las posiciones=2,2) y 60,1% requiriendo TTFF≤60 seg
(promedio para todas las posiciones =62,1 seg.), mejor al registrado
por Lizcano y Cavelier (2004) para un collar marca Lotek en una zona
andina similar (Risaralda, Colombia) sobre un tapir de montaña
(Tapirus pinchaque) (éxito de posiciones de 28% y DOP promedio
3,6), y similar al desempeño reportado en Australia por Blackie
(2010) para collares de la marca Sirtrack sobre el pósum cola de
cepillo (Trichosurus vulpecula) en ambientes mixtos de bosques y
pasturas (promedio de éxito de posiciones 64,8% y HDOP promedio
de 2,9), y por Matthews et al. (2013) para collares de la marca
Telemetry Solutions Quantum 4000 sobre el quol moteado (Dasyurus
maculatus) en agroecosistemas de la isla de Tasmania (promedio de
éxito de posiciones 64% y HDOP promedio de 2). Sin embargo, el
daño prematuro del collar utilizado en este estudio y el cambio
arbitrario que asumió sobre la programación diaria de
toma de posiciones, indican que este dispositivo en general no
mostró un buen desempeño para el seguimiento del oso
marcado, porque la cantidad de datos que se obtuvo durante su
funcionamiento no permitió realizar inferencias sobre la
ecología de la especie.
Los collares con tecnología GPS muestran expectativas de vida
muy variables (20 días a 11 meses para ambientes andinos
(Castellanos 2014, Lizcano y Cavelier 2004), constituyendo un problema
no sólo por el elevado costo de reemplazar estos equipos, o por
el impacto negativo que implica la pérdida del esfuerzo
logístico requerido para capturar un animal silvestre, sino
también por la salud de los individuos marcados, porque el
daño súbito de los collares involucra también el
funcionamiento del mecanismo de caída, impidiendo su retiro del
animal marcado y generando posibles efectos negativos en su salud a
largo plazo (Garshelis y McLaughlin 1998).
Conclusiones
Durante su funcionamiento (41 días) el dispositivo mostró
un buen desempeño, similar al reportado como exitoso para
collares GPS de las marcas Sirtrack y Telemetry Solutions Quantum 4000
en Australia (Blackie 2010, Matthews et al. 2013), e incluso mejor al
reportado para la marca Lotek en un ambiente andino similar en Colombia
(Lizcano y Cavelier 2004). Sin embargo, el daño prematuro del
collar utilizado en este estudio y el cambio arbitrario que
asumió sobre la programación diaria de toma de
posiciones, indican que este dispositivo en general no mostró un
buen desempeño para el seguimiento del oso marcado, porque la
cantidad de datos que se obtuvo durante su funcionamiento no permite
hacer inferencias sobre la ecología de la especie. Por todo
esto, no se recomienda el uso de esta marca de collares en la especie o
en los ambientes abordados, teniendo en cuenta el costo de adquirir
este tipo de dispositivos y la inversión logística
necesaria para posicionarlos en ejemplares de fauna silvestre.
Aún falta mucho por conocer sobre el funcionamiento de esta
tecnología en los Andes, teniendo en cuenta que sólo
Lizcano y Cavelier (2004) y Castellanos (2014) habían descrito
algunos pocos aspectos de su desempeño en estos ambientes. Los
investigadores que deseen emplear collares GPS deben ser conscientes de
las limitaciones actuales de esta tecnología, relacionadas con
la vida útil corta de algunos de los dispositivos debido a
daños súbitos (Moen et al. 2001, Lizcano y Cavelier 2004,
Zweifel-Schielly y Suter 2007, Blackie 2010, Castellanos 2014).
Agradecimientos
Agradecemos a Gabriela Fontanarosa (CONICET), Yeimy Castillo (WII) y
Laura Castrillón (WCS), por sus valiosos comentarios a versiones
preliminares del manuscrito. El presente trabajo hizo parte del
convenio denominado “Captura, inmovilización, marcaje,
liberación y seguimiento a osos andinos relacionados con eventos
de depredación de ganado en la jurisdicción de
CORPOGUAVIO”, realizado entre la Fundación WII, la entidad
estatal CORPOGUAVIO y Nexen Petroleum Colombia Ltd.
Literatura citada
- Aguilar M, Rangel-Ch. JO.
1996. Clima de alta montaña en Colombia. En: El páramo:
ecosistema a proteger. Serie Montañas Tropoandinas II.
Bogotá: Fundación de Ecosistemas Andinos (ECOA); pp.
73-130.
- Amanzo J, Appleton R,
Van-horn R. 2014. Efecto de la disponibilidad estacional del fruto del
sapote (Colicodendron scabridum‚ Capparaceae) en la
condición corporal del oso andino en el bosque estacionalmente
seco de Lambayeque‚ Perú. (En línea) (Acceso 16 de
julio 2015) URL <www.congresocolombianodezoologia.org>
- Blackie HM. 2010.
Comparative performance of three brands of lightweight Global
Positioning System Collars. J Wildl Manage. 74: 1911-6.
- Bowman JL, Kochanny CO,
Demarais S, Leopold BD. 2000. Evaluation of a GPS collar for
white-tailed deer. Wildl Soc Bull. 28:141-5.
- Castellanos A. 2002.
Captura de osos andinos con trampa Iznachi en Ecuador. (En
línea) (Acceso 14 de junio 2015). URL <http://www.andeanbear.org/papers/spanish/captura-de-osos-andinos-con-trampa-iznachi-esp.pdf>
- Castellanos A, Altamirano
M, Tapia G. 2005. Ecología y comportamiento de osos andinos
reintroducidos en la reserva biológica Maquipucuna, Ecuador:
implicaciones en la conservación. Rev Polit. 26: 54-82.
- Castellanos A.
Reintroducción y monitoreo telemétrico de osos andinos en
Ecuador. 2014. (En línea) (Acceso 16 de Julio 2015) URL <www.congresocolombianodezoologia.org>
- Cleef AM. 1978.
Characteristics of neotropical paramo vegetation and its subantarctic
relations. In: Troll C, Lauer W, eds. Geoecological relations between
the southern temperate zone and the tropical mountains. Wiesbaden:
Erdwiss Forsch.
- D’eon RG, Delparte
D. 2005. Effects of radio-collar position and orientation on GPS
radio-collar performance, and the implications of PDOP in data
screening. J Appl Ecol. 42: 383-8.
- Evans A, Sahlén V,
Støen O-G, Fahlman Å, Brunberg S, Madslien K, et al. 2012.
Capture, anesthesia, and disturbance of free-ranging brown bears (Ursus
arctos) during hibernation. PLoS ONE. 7: e40520.
doi:10.1371/journal.pone.0040520.
- Garshelis DL, McLaughlin CR. 1998. Review and evaluation of breakaway devices for bear radiocollars. Ursus. 10: 459-65.
- Garshelis DL. 2004.
Variation in ursid life histories, is there an outlier? In: Lindburg D,
Baragona K, eds. Panda conservation. Berkeley: University of California
Press; pp. 53-73.
- Gervasi V, Brunberg S,
Swenson JE. 2006. An individual-based method to measure animal activity
levels: a test on brown bears. Wildl Soc Bull. 34: 1314-9.
- Heard DC, Ciarniello LM,
Seip DR. 2008. Grizzly bear behavior and Global Positioning System
Collar fix rates. J Wildl Manage. 72: 596-602.
- Instituto Nacional de los
Recursos Naturales Renovables (INDERENA). 1986. Parques Nacionales.
Bogotá: Instituto Nacional de Recursos Naturales y Fondo FEN;
262 pp.
- Kays R, Crofoot MC, Jetz
W, Wikelski M. 2015.Terrestrial animal tracking as an eye on life and
planet. Science. 348: doi: 10.1126/science.aaa2478
- Kozakai C, Koike S,
Yamazaki K, Furubayashi K. 2008. Examination of captive Japanese black
bear activity using activity sensors. Mamm Study. 33: 115-9.
- Langley RB. 1999. Dilution of precision. [Revista en línea] GPS World 5: 52-9. (Acceso 15 de junio de 2015, en: http://www.nrem.iastate.edu/class/assets/nrem446_546/week3/Dilution_of_Precision.pdf
- Lewis JS, Rachlow JL,
Garton EO, Vierling LA. 2007. Effects of habitat on GPS collar
performance: using data screening to reduce location error. J Appl
Ecol. 44: 663-71.
- Lizcano DJ, Cavelier J.
2004. Using GPS collars to study mountain tapirs (Tapirus pinchaque) in
the Central Andes of Colombia. Tapir Conserv. 13: 18-23.
- Matthews A, Ruykys L,
Ellis B, FitzGibbon S, Lunney D, Crowther MS, et al. 2013. The success
of GPS collar deployments on mammals in Australia. Australian Mammalogy
35: 65-83. .doi.org/10.1071/AM12021
- Millspaugh JJ, Marzluff JM. 2001. Radio tracking and animal populations. San Diego: Academic Press; 474 pp. doi: http://dx.doi.org/10.1644/1545-1542
- Moen RA, Pastor J, Cohen YC. 1996a. Interpreting behavior from activity counters in GPS collars on moose. Alces. 32: 101-8.
- Moen RA, Pastor J, Cohen
YC, Schwartz CC. 1996b. Effects of moose movement and habitat use on
GPS collar performance. J Wildl Manage. 60: 659-68.
- Moen RA, Pastor J, Cohen YC. 2001. Effects of animal activity on GPS telemetry location attempts. Alces. 37: 207-16.
- Obbard ME, Pond BA,
Perera A. 1998. Preliminary evaluation of GPS collars for analysis of
habitat use and activity patterns of black bears. Ursus. 10: 209-17.
- Owen-Smith N, Goodall V.
2014. Coping with savanna seasonality: comparative daily activity
patterns of African ungulates as revealed by GPS telemetry. J Zool.
(Lond) 293:181-91.
- Paisley S, Garshelis DL.
2006. Activity patterns and time budgets of Andean bears (Tremarctos
ornatus) in the Apolobamba Range of Bolivia. J Zool. (Lond) 268: 25-34.
- Rangel-Ch JO. 2000. Clima
de la región paramuna. En: Rangel-Ch JO, ed. La región de
vida paramuna. Colombia diversidad Biótica III. Bogotá:
Universidad Nacional de Colombia, Facultad de Ciencias, Instituto de
Ciencias Naturales; pp. 85-125.
- Rempel RS, Rodgers AR,
Abraham KF. 1995. Performance of a GPS animal location system under
boreal forest canopy. J Wildl Manage. 59: 543-51.
- Restrepo H,
Rodríguez D, Reyes A, Reyes-Amaya N, Rodríguez J,
Gómez H. 2014. Captura, inmovilización, marcaje,
liberación y de seguimiento a osos andinos (Tremarctos ornatus)
relacionados con eventos de depredación de ganado en la
jurisdicción de CORPOGUAVIO. Informe técnico.
Gachetá: Corporación Autónoma Regional del Guavio,
CorpoGuavio - Nexen Petroleum Colombia Ltd.
- Reyes-Amaya N. 2015.
Familia Ursidae. En: Suárez-Castro AF,
Ramírez-Cháves HE, eds. Los carnívoros terrestres
y semiacuáticos continentales de Colombia. Bogotá:
Universidad Nacional de Colombia; pp. 166-71.
- Rodríguez D,
Sandoval M, Torres Y, Quintero V, Feliciano O, Callejas R, et al. 2004.
Reintroducción y seguimiento de un ejemplar de oso de anteojos
(Tremarctos ornatus) en la zona de influencia del Páramo de
Mamapacha, departamento de Boyacá. Informe técnico.
Garagoa: Corporación Autónoma Regional de Chivor
(CORPOCHIVOR).
- Rodríguez D,
Restrepo H, Reyes A, Viteri MP, Van-Horn R, García-Rangel S.
2015. III International symposium on andean bear conservation and
management: Land of bears, land of people, land of all; a tribute to
Bernard Peyton, pioneer in researching the adean bear. Internat Bear
News, 24: 43-5.
- Van Horn R, Appleton R,
Vallejos-Aguinaga J, Sánchez-Aguinaga I, Vallejos-Aguinaga J,
Owen M, et al. 2014. Madrigueras natales de los osos andinos
(Tremarctos ornatus) en el bosque tropical estacionalmente seco de
Lambayeque‚ Perú. (En línea) (Acceso 16 de julio
2015) .URL <www.congresocolombianodezoologia.org>
- Vargas O, Pedraza P.
2004. Parque Nacional Natural Chingaza. Bogotá: Departamento de
Biología, Universidad Nacional de Colombia; 197 pp.
- Yamazaki K, Kozakai C,
Kasai S, Goto Y, Koike S, Furubayashi K. 2008. A preliminary evaluation
of activity-sensing GPS collars for estimating daily activity patterns
of Japanese black bears. Ursus. 19:154-61.
- Zweifel-Schielly B, Suter
W. 2007. Performance of GPS telemetry collars for red deer Cervus
elaphus in rugged Alpine terrain under controlled and free-living
conditions. Wildlife Biol. 13: 299-312.